
Hybrid Engine Hotfire
Snapshots from our latest nitrous/paraffin hotfire and test stand checkout.
Connect with us on YouTube, Instagram, TikTok, and LinkedIn to follow our progress.
For press inquiries, please contact us directly.
Snapshots from our latest nitrous/paraffin hotfire and test stand checkout.

Generously sponsored by the Georgia Tech Student Foundation (GTSF).

Scenes from our booth at the Fall org fair.
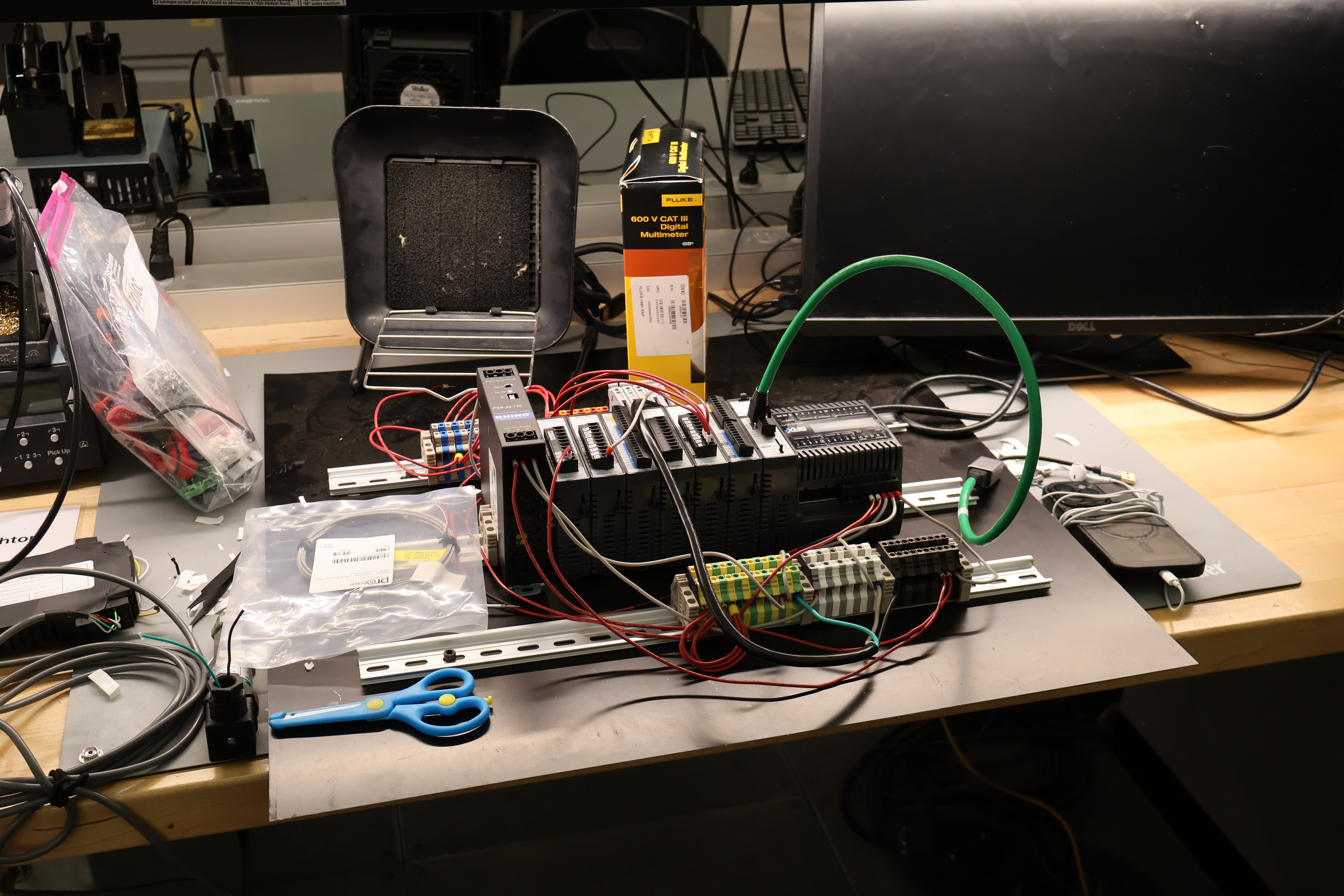
A look at our DAQ module sponsored by Automation Direct.

Our first All Hands of the 2025 Fall Semester.

Putting our engine together before the first hotfire.

Sukhmani working on our pneumatic manifold.

Highlighting one of our subteam leads and their work on GTPL.

Quick cuts from hose-ups to countdowns at the test site.